Scheda driver per 3 motori passo passo con L297 + L298 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Descrizione generale | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

La scheda driver è costruita con la coppia di circuiti integrati L297 - L298. Questa può essere alimentata con una tensione continua (Vin) tra 12V e 24V. La corrente della sorgente è calcolata sommando la corrente desiderata per ogni motore piu 300mA per la parte logica(5V). L'alimentazione della parte logica della scheda è ricavata dall'alimentazione principale che è stabilizzata (con un ci LM7805) a 5V. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Per i finali di potenza è necessario un dissipatore più grande. Questo può essere costruito da un pezzo di alluminio rettangolare con le seguenti dimensioni: - altezza minima 25mm ; - lunghezza 85mm; - spessore tra 3 e 20mm.  Nel disegno di sopra sono mostrate le coordinate dei fori per il dissipatore. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
La scheda è divisa in 4 sezioni: - 3 sezioni identiche , denominate in seguito Driver con i circuiti L297, L298 e i componenti corrispondenti; - l'interfaccia con il computer o il microcontrollore. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Sezione Driver | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Ognuno dei tre driver è indipendente e può essere pilotato senza l'utilizzo della parte interfaccia con i segnali Step / Direction, disponibili al connettore SV3, SV4, SV5 per i motori X,Y rispettivamente Z. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
La corrente di lavoro dei motori passo passo è regolata con i seguenti trimmer in due situazioni:
La corrente di carico del motore viene calcolata con la formula Ip= Upin15/ Rsense dove Upin15 è la tensione misurata al pin15 dell'integrato L297 (in V) e "Rsense" è il valore della resistenza montata tra pin 1(15) dell'integrato L298 e GND (in Ohm).
Tabella con le tensioni Usense corispondente a 4 valori delle resistenze Rsense e la corrente a quale si desidera fare funzionare il motore. Sono evidenziati i valori consigliati per quattro situazioni (0.6A, 1A, 1.5A e 2.5A). Pw rappresenta la potenza elettrica dissipata sula resistenza Rsense espressa in W. Per approfondire il funzionamento dei motori passo passo (problemi e soluzioni) è utile studiare questa Application Note da ST. Inoltre è indicato di consultare anche i datasheet dei integrati L297 e L298. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Sezione interfaccia | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
La sezione interfaccia contiene 3 fotoaccoppiatori quadrupli (due per gli ingressi e uno per l'uscita) che separano galvanicamente la scheda dal circuito di comando esterno (pc o microcontrollore). Per utilizzare il terzo fotoaccoppiatore -OK1 (per gli interruttori di fine corsa) è necessaria una sorgente di alimentazione esterna alla scheda (può essere utilizzata la tensione fornita dalla porta USB del PC). Questa tensione esterna necessaria all'alimentazione delle resistenze pull-up può essere di 5V o 3,3V in funzione della tensione che accetta il microcontrollore ai pin di ingresso. I fotoaccoppiatori invertono i segnali di ingresso (step, dirrection..) e inseriscono un ritardo "Tdelay" di 16µS (con i valori dei componenti trovati nello schema).
Nel grafico sono rappresentati con rosso il segnale applicato all'ingresso della scheda e con blu il segnale che troviamo al pin step dell'integrato L297. Riassumendo, un nuovo passo è processato dal CI L297 dopo 16µS (Tdelay) dal fronte di discesa dell'impulso applicato all'ingresso della scheda. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Tabella con la descrizione dei connettori e dei segnali per la connessione della scheda driver all'unità di comando (LPT-PC o microcontrollore). |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
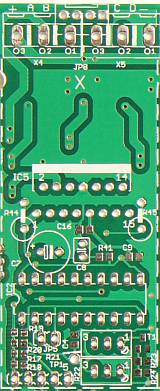
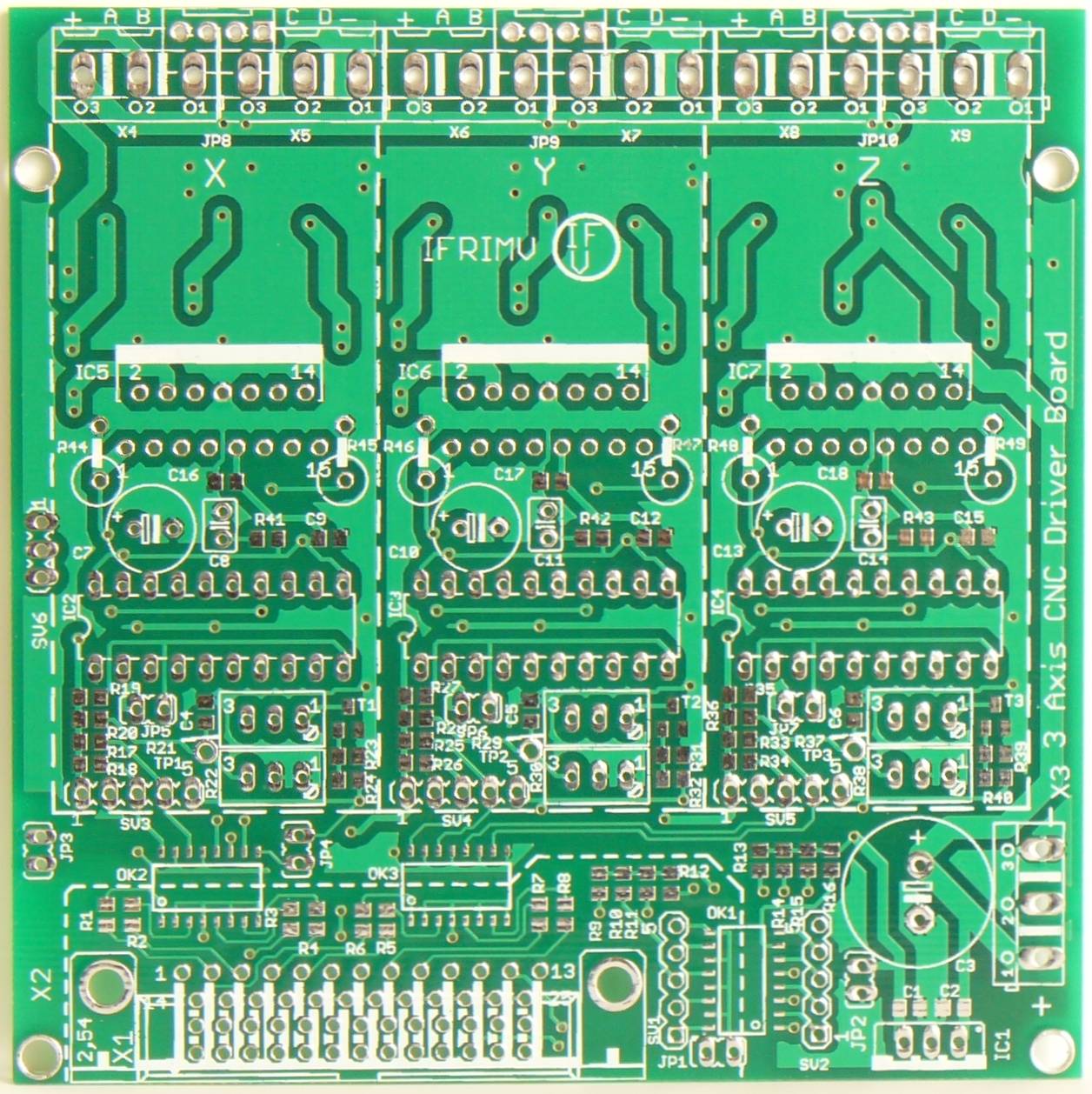
| PCB Top View | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
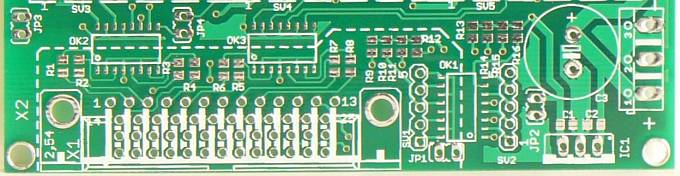
| PCB Bottom View | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Variante di montaggio PCB | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| C1 - Pc LPT control | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| C2 - Arduino control | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| C3 - 3 Independent drivers | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
In questa variante i tre driver si possono pilotare in modo indipendente (senza l'interfaccia con fotoaccoppiatori). Per separare anche l'alimentazione è necessario interrompere le piste di alimentazione (+5v, V+ e GND). Inoltre è possibile separare fisicamente i tre driver effettuando dei tagli, seguendo le linee tratteggiate che li separano. In questo caso si deve fare un taglio con una larghezza massima di 1mm, altrimenti si rischia di tagliare le piste. Scarica il file pdf con schema e il pcb della variante - "3 independent drivers". |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

1. L'intero contenuto del sito web è fornito a titolo informativo e ed è protetto da copyright;
2. E' pertanto vietato copiare, pubblicare e utilizzare i contenuti presenti senza citarne la fonte ed è severamente vietato servirsene a scopo commerciale senza il consenso scritto dell'autore;
3. Tutto il materiale contenuto in queste pagine può essere liberamente consultato, salvato per uso personale e modificato rispettando la condizione precedente (2.);
4. Ifrim Valentin non si assume alcun tipo di responsabilità per danni di qualsiasi tipo derivanti dall'uso, riferimento a, o affidamento sulle informazioni contenute all'interno del sito;
5. Sebbene sul presente sito web siano pubblicati link che forniscono accesso diretto ad altre risorse Internet, tra cui siti web, Ifrim Valentin non è responsabile per l'accuratezza o il contenuto delle informazioni contenute in questi siti;
6. Tutti i marchi riportati appartengono ai legittimi proprietari.